 Робототехникам часто приходится изобретать велосипед заново – дублировать функции биологических тел в резине, металле и пластмассе. Это сложная задача, поскольку биологические организмы часто являются удивительными машинами. Человеческая рука, в частности, является достижением эволюционной инженерии.
Робототехникам часто приходится изобретать велосипед заново – дублировать функции биологических тел в резине, металле и пластмассе. Это сложная задача, поскольку биологические организмы часто являются удивительными машинами. Человеческая рука, в частности, является достижением эволюционной инженерии.
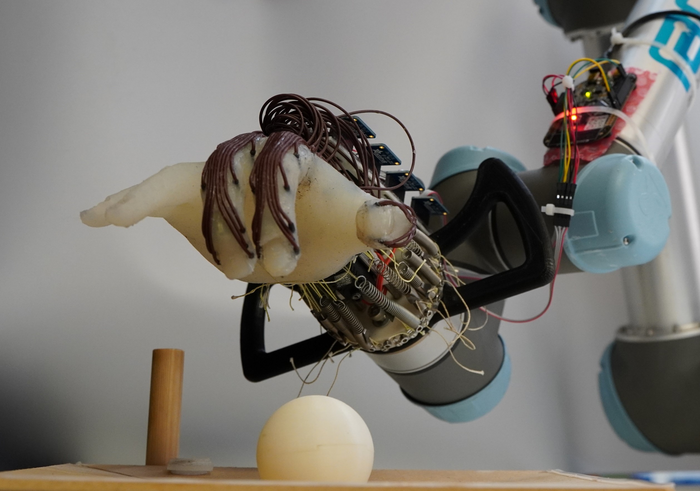
Исследователи из Кембриджского университета разработали роботизированную руку, которая отражает сложность этой задачи и некоторые принципы, которые могут помочь в разработке этой технологии. Одна особенность этого исследования показалась мне важной из-за того, как оно отражает реальную функцию человеческой руки, не упомянутую в статье или пресс-релизе. Это заставило меня задуматься, осознавали ли робототехники, что они воспроизводят известный принцип.
Феномен, о котором идет речь, называется тенодез (я поискал в газете и не смог найти этот термин). Я узнал об этом во время прохождения практики по неврологии в реабилитационном центре. Когда вы разгибаете запястье, сухожилия на пальцах натягиваются, что приводит к их слабому сгибанию. Люди с повреждением спинного мозга на уровне С6-7 могут разгибать запястье, но не сжимать пальцы. Таким образом, они могут научиться использовать эффект тенодеза для получения функционального представления, что может существенно повлиять на их независимость.
Робототехники из Кембриджа, по-видимому, независимо друг от друга пришли к той же идее. Они спроектировали роботизированную руку, которая является антропоморфной, но пальцы которой не были прикреплены к приводам. Однако робот мог сгибать запястье, что пассивно приводило к сгибанию пальцев для захвата – точно так же, как это происходит в человеческих руках при тенодезе. Но зачем роботехникам создавать роботизированную руку с “парализованными” пальцами? Ответ прост – для повышения эффективности. Прикрепление всех пальцев к приводам – сложная инженерная задача, а использование этих приводов требует много энергии. Таким образом, пассивный захват гораздо более энергоэффективен, что является огромным преимуществом в робототехнике.
Исследователи по-прежнему планируют наделить свою роботизированную руку большей функциональностью, придав пальцам независимое движение. Но когда они это сделают, они чувствуют, что это будет сделано с максимальной эффективностью. Это очень эволюционный подход к проектированию робототехники. Я уже обсуждал это ранее в контексте робототехники и искусственного интеллекта. В ходе эволюции, в силу необходимости (начиная с максимальной простоты), а также из-за эффективности, все проектируется снизу вверх. Возьмем любую структуру, например человеческий глаз. Эволюционно глаз не был полностью сформирован. Скорее всего, он прошел несколько этапов эволюции от простой повязки на глазу до современного глаза позвоночных, причем каждый этап был полностью функциональным. Каждая особенность развивается и становится функциональной, прежде чем добавляется новая сложность. Это не всегда приводит к оптимальному дизайну, поскольку подход “снизу вверх” может закрепить функции, которые работают на простом уровне, но затем становятся основой для более сложных разработок (глаз позвоночных, опять же, является отличным примером).
Человеческие технологии также могут работать подобным образом. Плуги просты, но эффективны, и технология развивалась в несколько этапов, пока мы не добрались до современных тракторов. Технологическая эволюция иногда также связана со старыми функциями, которые трудно изменить (например, раскладка современной клавиатуры). Но с развитием технологий возможностей больше, чем с биологической эволюцией. Вы можете изменить основные функции, если они больше не работают. Вы можете внедрить технологии, разработанные для других целей. Двигатель внутреннего сгорания не был разработан специально для вспашки, но в сочетании с плугом он действительно хорошо подходит для создания трактора.
Эволюция также любит эффективность. Организмы, живущие в условиях жесткой конкуренции за ресурсы, стремятся к максимальной эффективности. Я говорю “стремятся”, потому что здесь действуют и другие факторы. Демонстрация павлинов, конечно, не является эффективной тратой энергии, но она необходима для размножения самцов, так что оно того стоит.
В любом случае, разработка роботизированных систем, которые функционируют на базовом и простом уровне, а затем постепенно усложняются, кажется хорошим решением. Пассивные функции, такие как тенодезический захват, являются одним из таких примеров. Рассматриваемая рука робота также имеет “кожу” с датчиками, благодаря чему рука робота может определять, насколько крепко она что-то сжимает. Это позволяет ей не ронять предметы, но и не ломать их. Люди воспринимают это как должное, но для роботов это может оказаться сложной задачей.


Такой подход – проектирование подсистемы, которая, по сути, эффективно работает сама по себе, – также является отличным общим подходом к робототехнике. Например, сотрудники Boston Dynamics разработали совершенных роботов, которые могут ходить. Они не сделали этого, создав сверхинтеллектуального робота, который управлял бы своими движениями на чем-то вроде сознательного уровня (как кора головного мозга человека). Скорее, он разработал алгоритм ходьбы, который функционирует скорее как ствол мозга – примитивный набор рефлексов и алгоритмов, которые в совокупности дают нечто похожее на пассивную ходьбу. Когда вы идете, вы не думаете о каждом сокращении мышц. Вы не смотрите под ноги, не задумываетесь о том, под каким углом вы стоите, и о силе ваших мышц. Вы просто идете. Это происходит автоматически, буквально на подсознательном уровне. Ходьба – это подсистема в примитивной (то есть старой) части вашего мозга. Ходьба включает в себя пассивные рефлексы, которые возникают без необходимости в какой-либо обработке на более высоком уровне. В мышцах присутствуют рефлексы растяжения, вестибулярные рефлексы, глазные рефлексы и тонус мышц, отвечающих за противодействие гравитации. Равновесие требует работы мозжечка (высокоуровневая обработка информации, но все же подсознательная), и это аналогично программному обеспечению для ходьбы, разработанному Boston Dynamics.
Я думаю, все это означает, что робототехники научились применять эволюционный подход “снизу вверх” к проектированию роботов. Они разрабатывают способы выполнения конкретных задач с максимальной простотой и эффективностью. Затем эти функции могут быть объединены или дополнены дополнительными функциями с конечной целью создания мягкого антропоморфного робота с функциональностью на уровне человека. Но робототехники могут сделать то, чего не может сделать эволюция, – перестроить основные функции таким образом, чтобы они соответствовали расширенным функциям. Эволюция не может фундаментально перестроить глаз позвоночных, потому что базовая структура уже заложена в биологии развития и генетической архитектуре. Эволюционного механизма для того, чтобы что-то подобное произошло, просто не существует. Но робототехники могут. Поэтому, как только будет достигнута функциональность человеческого уровня, есть все основания полагать, что она будет превзойдена.
Но впереди еще долгий путь. Человеческое тело по-прежнему остается невероятной машиной.